



Project Details / 项目资讯
- GitHub URL / GitHub 链接: Shadow-Detection-Algorithm-for-Aerial-and-Satellite-Images
Description / 描述
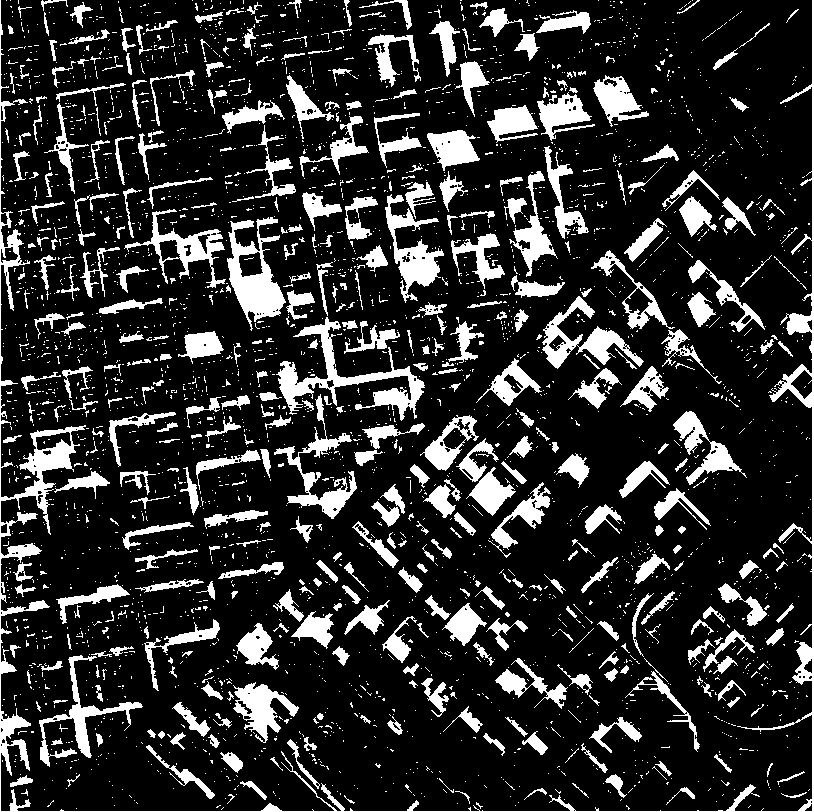
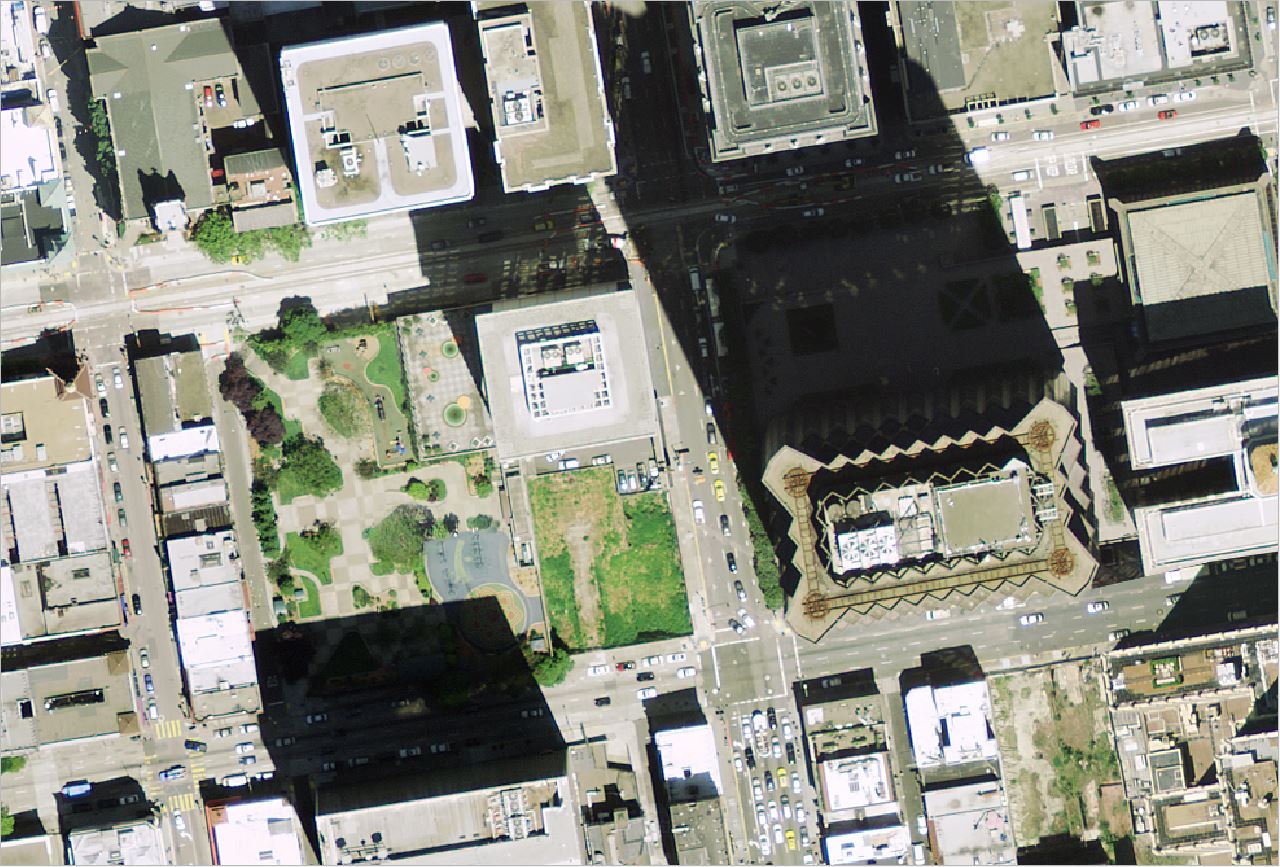
This algorithm is split into 2 components, the shadow mask extraction component and the shadow masked area re-lighting component. The shadow mask extraction component outputs a shadow mask feature map, which is obtained by several thresholding, morphological operations on histograms computed from the remote sensing image in the CIELCh color space. It is noted that the Otsu's thresholding algorithm is replaced by the K-Means clustering algorithm in this implementation as it is more computationally efficient and less time-consuming. The shadow masked area re-lighting component outputs a corrected version of the input remote sensing image, mainly by calculation of an illumination ratio between border and shadow regions, and re-adjusting the pixel intensity values of the image in the shadow areas in order to brighten those areas. The five images shown here are the original remote sensing image, the shadow mask image, the shadow compensated image, a zoomed-in section of the original remote sensing image, and the shadow compensated version of the zoomed-in component (from left to right respectively).
此算法分为 2 个部分:阴影掩码提取部分和阴影掩码区域再照明部分。阴影掩码提取部分是通过在 CIELCh 颜色空间中的遥感图像计算的直方图上进行多次阈值处理和形态学操作获得的阴影掩码特征图。 值得注意的是,Otsu 的阈值算法在此实现中被 K-Means 聚类算法替代,因为它更具计算效率且耗时更少。 阴影掩码区域再照明部分是通过计算边界和阴影区域之间的照明比率,并重新调整图像在阴影区域的像素强度值来增亮这些区域而输出遥感图像的校正版本。 这里显示的五张图像分别是原始的遥感图像、阴影掩码图像、阴影补偿图像、放大的原始遥感图像部分,以及放大部分的阴影补偿版本(从左到右)。
30+ ⭐ on GitHub / GitHub 上有 30+ 个 ⭐
Reference
[1] Silva, G. F., Carneiro, G. B., Doth, R., Amaral, L. A., & de Azevedo, D. F. (2018). Near real-time shadow detection and removal in aerial motion imagery application. ISPRS Journal of photogrammetry and remote sensing, 140, 104-121.